Robotics-II-Circuit-Python
Circuit Python tutorials in Robotics II
View the Project on GitHub MrPrattASH/Robotics-II-Circuit-Python
Table of Contents
Arcade Drive (DC Motors)
The goal of this lesson is to teach you how to wire up your rover to be able to run in RC mode. You will have to:
- Wire the FlySky RC controller
- Wire the Motor controller for powering the drive motors
- Run the attached program to make your rover RC controlled!
Controlling Rovers
There are two classic ways of controlling a 2 or 4 wheeled rover that has a tank drive drivetrain.
From xiaoxiae on Github:
Tank drive is a method of controlling the motors of a tank drive drivetrain using two axes of a controller, where each of the axes operate motors on one side of the robot.
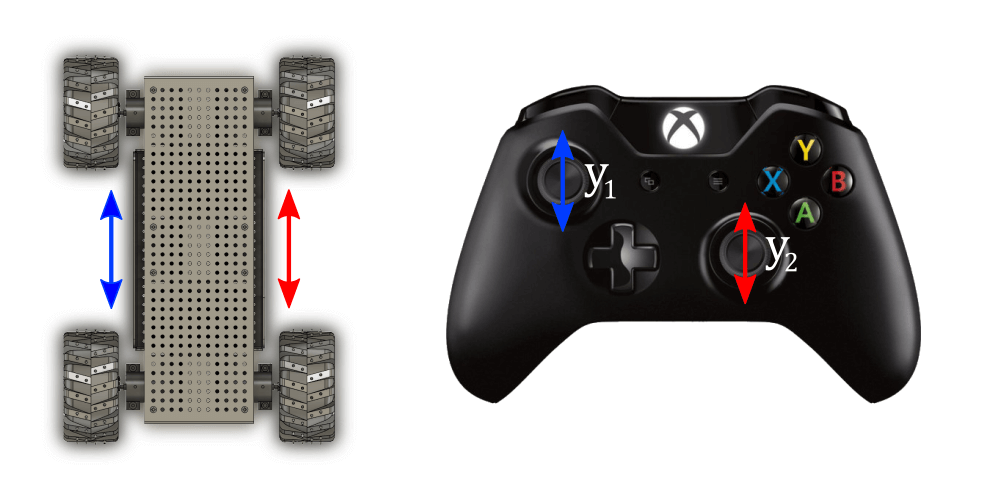
In contrast, Arcade drive is a method of controlling the motors of a tank drive drivetrain using two axes of a controller, where one of the axes controls the speed (throttle) of the robot, and the other the steering (spin) of the robot.

Rover Setup
Your rover needs the following hardware:
- Flysky receiever
- x2 DC motors OR x4 DC motors connected via y Splitter
- RoboClaw Motor Controller (2x30A recommended)
Video Tutorial
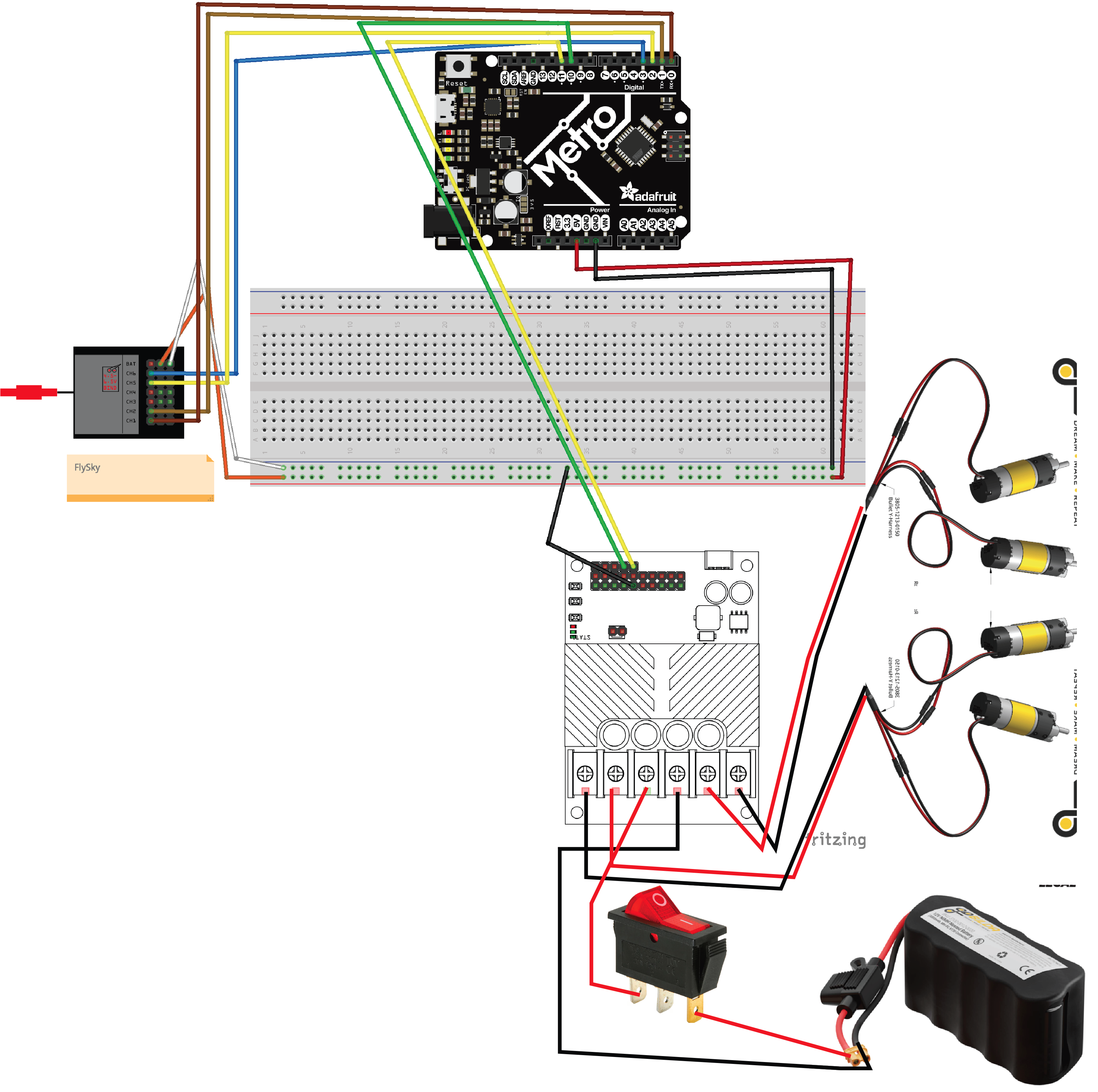
Watch the following video and follow along with the wiring to get your rover prepared for RC control.
Wiring Diagram (sans 9V batter pack for microcontroller power)
Text Tutorial
Required Libraries
Before moving forward, ensure you have the following arcade_drive_dc.py and rc.py py files on your CIRCUITPY lib folder.
Example Code
import time
import board
from rc import RCReceiver
from arcade_drive_dc import Drive
rc = RCReceiver(ch1=board.D0, ch2=board.D1, ch3=None, ch4=None, ch5=board.D2, ch6=board.D3)
drive = Drive(left=board.D10, right=board.D11)
# Main code
while True:
# Read joystick channels
spin = rc.read_channel(1) # spin
throttle = rc.read_channel(2) # throttle
if spin is not None and throttle is not None: # must not be None to do something with the output
drive.drive(spin,throttle) # move our motors arcade drive style
time.sleep(0.02) # keep timer in sync with flysky receiver
Code Breakdown
Again, while it is not necessary for you to understand this code, a rudimentary understanding of what is happening is useful for the course.
Importing Necessary Libraries
import board
import time
from rc import RCReceiver
from arcade_drive_dc import Drive
- board: This library provides board-specific constants to specify pins used for input and output. It’s essential to identify which pins on the board connect to devices.
- time: This library allows us to use time-related functions, especially
sleep. - RCReceiver and Drive: These are imported from custom modules.
RCReceiveris used to handle the input from the RC receiver, whileDriveis used to control the driving mechanism of the robot.
Setting Up the RC Receiver and Drive
rc = RCReceiver(ch1=board.D10, ch2=board.D11, ch3=None, ch4=None, ch5=board.D12, ch6=board.D13)
drive = Drive(left=board.D0, right=board.D1)
- The RCReceiver is initialized with different channels corresponding to different board pins.
- The Drive is set up with pins controlling the left and right DC motors.
- The pwm motor objects are initialized in the library itself, not in your
code.pyfile.
- The pwm motor objects are initialized in the library itself, not in your
Main Code Loop
The code enters an infinite loop, constantly checking for input from the RC receiver and updating the drive system accordingly.
while True:
# Read joystick channels
spin = rc.read_channel(1) # spin
throttle = rc.read_channel(2) # throttle
if spin is not None and throttle is not None: # Ensures valid input
drive.drive(spin, throttle) # Moves the motors based on input
print("spin", spin, "throttle", throttle) # Displays the current input values
time.sleep(0.02) # Maintains sync with our 20ms cycle every loop iteration
- Reading Channels: The code reads channel 1 for
spinand channel 2 forthrottleto get joystick input. - Checking Inputs: It checks if the inputs are not
None(meaning valid and connected inputs). - Driving Motors: If valid data is read, the
drivefunction is called to control the motors according to the joystick’s direction and throttle. - Print Statement: This outputs the current values of
spinandthrottleto the console for debugging purposes. - Delay: A short delay of 20-40 ish milliseconds is added to match the RC receiver’s duty cycle and avoid overwhelming the processor with too many instructions in a short period.
Conclusion
This code effectively allows for controlling a robot using an RC receiver and DC motors. It’s crucial to ensure that the pins and channels are correctly configured to match your hardware setup.