Robotics-II-Circuit-Python
Circuit Python tutorials in Robotics II
View the Project on GitHub MrPrattASH/Robotics-II-Circuit-Python
Table of Contents
Arcade Drive (Servo Motors)
By the end of this tutorial, you will have a fully RC controlled rover!
There are two classic ways of controlling a 2 or 4 wheeled rover that has a tank drive drivetrain.
From xiaoxiae on Github:
Tank drive is a method of controlling the motors of a tank drive drivetrain using two axes of a controller, where each of the axes operate motors on one side of the robot.
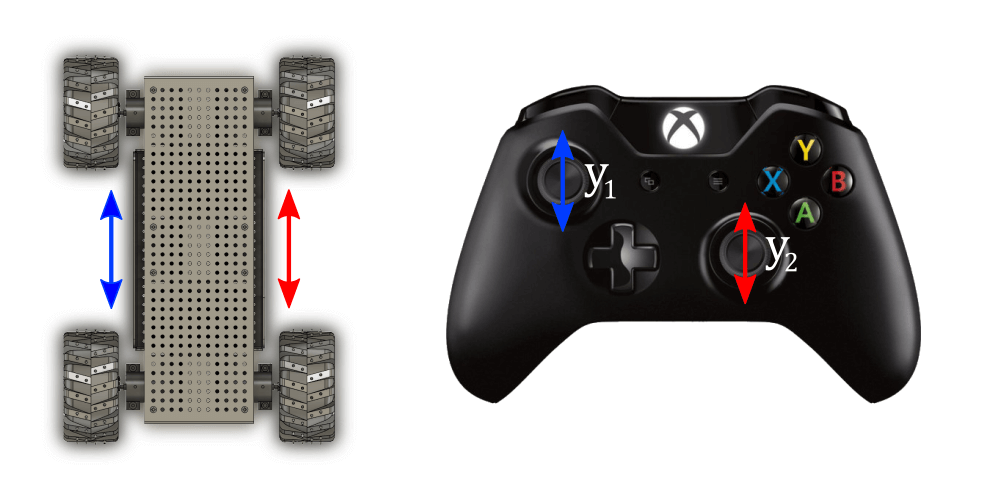
In contrast, Arcade drive is a method of controlling the motors of a tank drive drivetrain using two axes of a controller, where one of the axes controls the speed (throttle) of the robot, and the other the steering (spin) of the robot.

Rover Setup
Your rover needs the following hardware:
- Flysky receiever
- x2 motors, orientated in tank drive where x1 of the motor sides in inverted/mirrored
- These motors can be either Servo motors OR DC Motors, depending on your needs
Required Library
Before moving forward, ensure you have the following arcade_drive.py and rc.py py files on your CIRCUITPY lib folder.
Example Code
import time
import board
from rc import RCReceiver
from arcade_drive import Drive
# Initialize the receiver with designated pins for channels
rc = RCReceiver(ch1=board.D0, ch2=board.D1)
robot = Drive(motor_type="servo", left_pin=board.D4, right_pin=board.D5, scale = 1.0)
# if you find your driving too fast, try dropping DOWN the scale.
# Main code loop
while True:
spin = rc.read_channel(1)
throttle = rc.read_channel(2)
ch5 = rc.read_channel(5)
ch6 = rc.read_channel(6)
# Print the channel values to the console
print("Ch 1:", spin, "Ch 2:", throttle, "Ch 5:", ch5, "Ch 6:", ch6)
robot.drive(spin, throttle)
time.sleep(0.02) # add a minor sleep to keep in time with PWM cycle